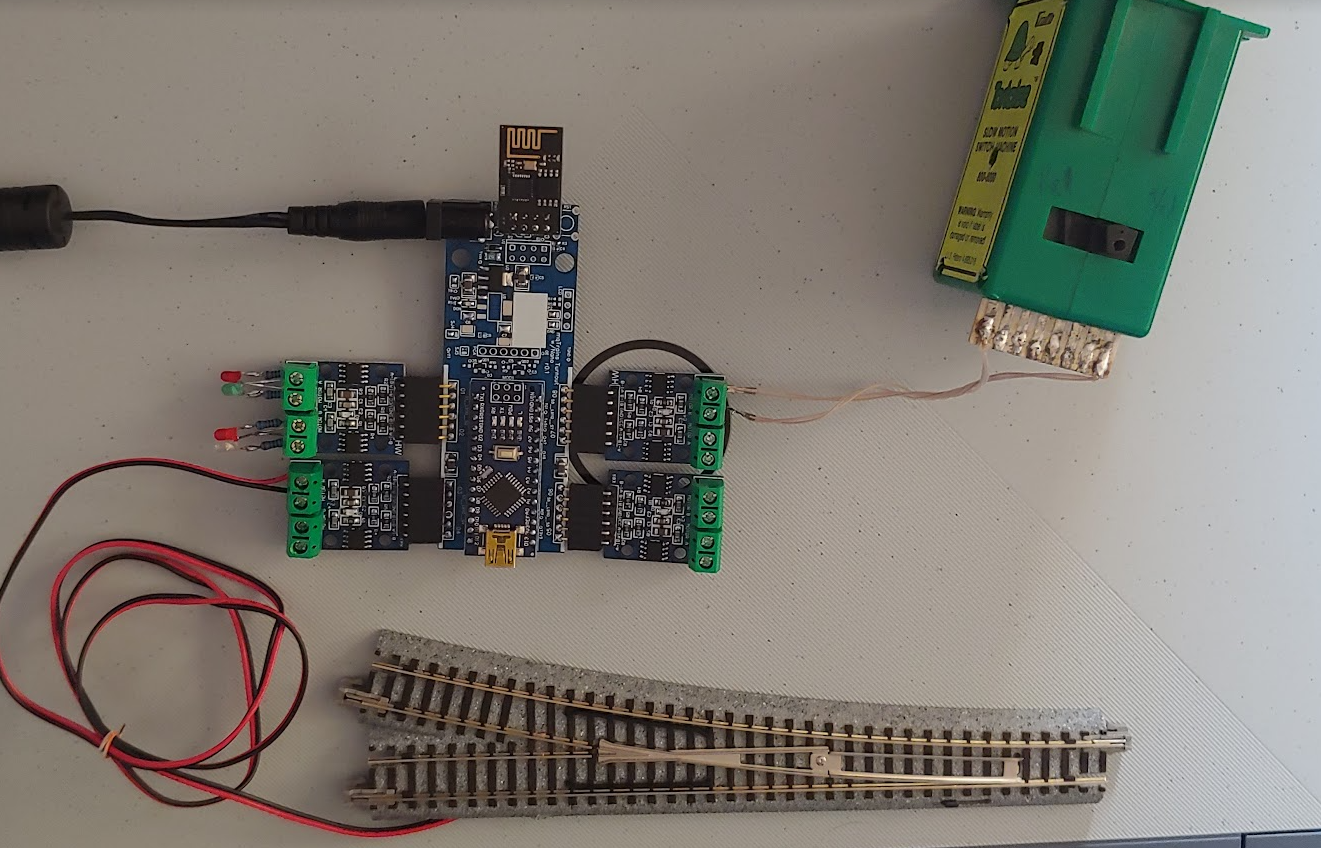
Ever want to control a snapping or momentary-coil-action turnout or device, like Kato, Atlas and others make. But, we only have 2 pins (already used for i2c), and you have 8 turnouts??? So why not put an inexpensive Arduino Nano in the way? And use it to control 4 x L9110S dual h-bridge control boards?
As it turns out, when you set the time to be ON in milliseconds to zero, it will STAY on and thus drive ANY stallmotor turnout too! So TortoiseTM, here we are…
We called it the “mqTrains Turnout Nano” and have it labelled as mqTrains_TurnoutNano_only. Very easily found with a search at OSHWLab: https://oshwlab.com/search?wd=mqtrains
The code for the Nano and ESP will appear on github shortly…
TortoiseTM is most likely trademarked by Circuitron Inc.